Général
Google DeepMind : un robot sur le point de dominer le tennis de table face aux humains !
Êtes-vous prêt à défier un robot au tennis de table ? Google DeepMind a réussi à entraîner un robot à jouer à ce sport à un niveau compétitif amateur. Pour la première fois, un robot a été formé pour rivaliser avec des humains. Bien qu’il ait remporté 13 des 29 matchs contre des adversaires humains, il a encore des progrès à faire face aux joueurs avancés. Cette avancée représente un pas vers des robots capables d’effectuer des tâches utiles dans des environnements réels. Les joueurs humains ont trouvé l’expérience amusante et engageante, envisageant même le robot comme un partenaire d’entraînement idéal !
Un Robot de Tennis de Table Entraîné par Google DeepMind
Une Révolution dans le Sport Robotique
Avez-vous déjà imaginé affronter un robot au tennis de table ? Google DeepMind a récemment annoncé avoir formé un robot capable de jouer à ce sport à un niveau compétitif amateur. C’est une première dans le domaine, où un robot est entraîné pour rivaliser avec des humains à un niveau comparable.
Performances Impressionnantes
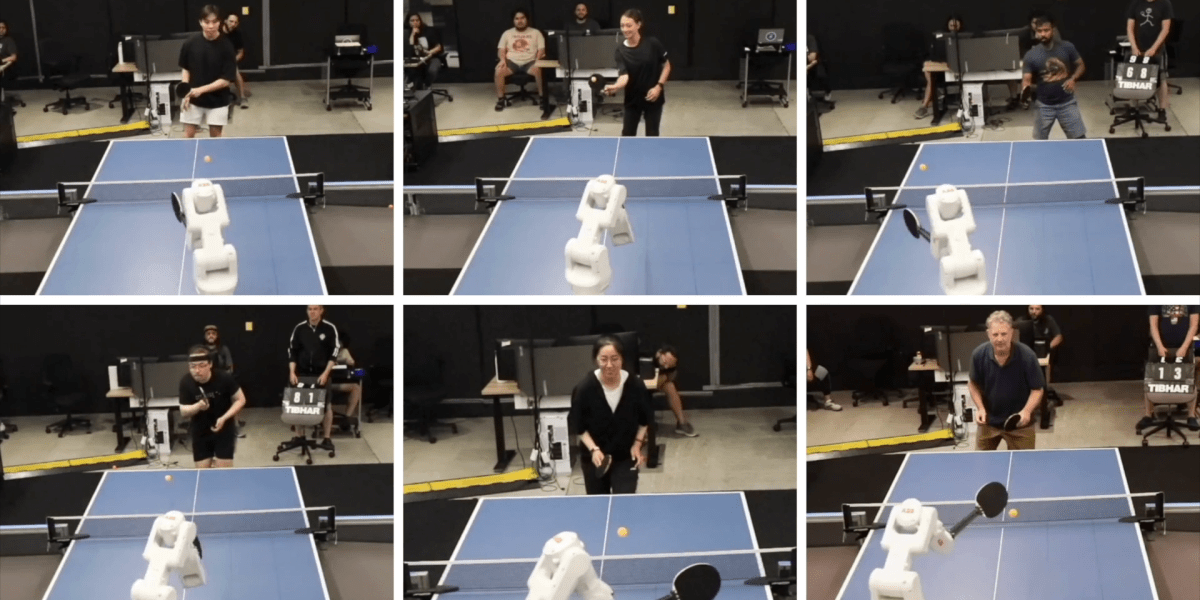
Les chercheurs ont réussi à faire en sorte qu’un bras robotique, équipé d’une raquette imprimée en 3D, remporte 13 des 29 matchs contre des adversaires humains de divers niveaux. Cette étude a été publiée dans un article sur Arxiv.
Bien que le robot ait montré des capacités prometteuses, il n’est pas encore parfait. Il a battu tous les joueurs débutants qu’il a affrontés et a remporté 55 % des matchs contre des amateurs, mais il a perdu tous ses duels contre des joueurs avancés. Néanmoins, ces résultats sont encourageants.
Une Avancée Technologique
« Il y a quelques mois, nous pensions que le robot ne pourrait pas gagner contre des personnes qu’il n’avait jamais affrontées auparavant. Le système a largement dépassé nos attentes », déclare Pannag Sanketi, ingénieur logiciel senior chez Google DeepMind et responsable du projet. « La manière dont le robot a su surpasser même des adversaires forts était incroyable. »
Cette recherche ne se limite pas à un simple divertissement. Elle représente une avancée vers la création de robots capables d’effectuer des tâches utiles avec compétence et sécurité dans des environnements réels, comme les foyers ou les entrepôts. Lerrel Pinto, chercheur en informatique à l’Université de New York, souligne que l’approche de Google DeepMind peut être appliquée à de nombreux autres domaines de la robotique.
Les Défis de l’Entraînement
Pour devenir un joueur de tennis de table compétent, il est essentiel de posséder une excellente coordination œil-main, une rapidité de mouvement et la capacité de prendre des décisions rapides en réponse à l’adversaire. Ces compétences représentent des défis majeurs pour les robots. Les chercheurs de Google DeepMind ont utilisé une méthode en deux étapes pour entraîner le système à imiter ces capacités : d’abord, des simulations informatiques pour maîtriser les compétences de frappe, puis un ajustement basé sur des données du monde réel, permettant ainsi une amélioration continue.
Une Base de Données Riche
Les chercheurs ont constitué un ensemble de données sur les états des balles de tennis de table, incluant des informations sur la position, la rotation et la vitesse. Le robot a utilisé cette bibliothèque dans un environnement simulé, conçu pour refléter fidèlement la physique des matchs de tennis de table, afin d’apprendre des compétences telles que le retour de service ou les coups de topspin. Étant donné que le robot ne pouvait pas servir, les matchs réels ont été adaptés en conséquence.
Un Système d’Amélioration Continue
Lors de ses matchs contre des humains, le robot collecte des données sur ses performances pour affiner ses compétences. Il suit la position de la balle grâce à des caméras et analyse le style de jeu de son adversaire à l’aide d’un système de capture de mouvement. Ces données sont réinjectées dans la simulation pour l’entraînement, créant ainsi une boucle de rétroaction continue.
Cette rétroaction permet au robot d’expérimenter de nouvelles compétences pour tenter de battre son adversaire, ajustant ainsi ses tactiques et son comportement comme le ferait un humain. Cela lui permet de s’améliorer progressivement, tant au cours d’un match donné qu’au fil du temps.
Les Limites à Surmonter
Le système a rencontré des difficultés pour frapper la balle lorsqu’elle était frappée très rapidement, hors de son champ de vision, ou très bas, en raison d’un protocole qui l’empêche de provoquer des collisions pouvant endommager sa raquette. Les balles avec effet ont également posé problème, car le robot ne pouvait pas mesurer directement la rotation, une limitation que les joueurs avancés ont su exploiter.
Chris Walti, fondateur de la société de robotique Mytra et ancien responsable de l’équipe de robotique de Tesla, souligne que simuler toutes les éventualités dans un environnement virtuel est un véritable défi. « Il est très difficile de simuler le monde réel en raison de toutes les variables, comme un coup de vent ou même de la poussière sur la table », explique-t-il.
Perspectives d’Amélioration
Google DeepMind envisage plusieurs solutions pour surmonter ces limitations, notamment le développement de modèles d’IA prédictifs capables d’anticiper la trajectoire de la balle et l’introduction d’algorithmes de détection de collision plus performants.
Une Expérience Appréciée par les Joueurs
Les joueurs humains ont trouvé du plaisir à s’affronter avec le bras robotique. Même les compétiteurs avancés, qui ont réussi à le battre, ont déclaré que l’expérience était amusante et engageante, et qu’ils voyaient un potentiel pour le robot en tant que partenaire d’entraînement dynamique pour améliorer leurs compétences.
« J’aimerais vraiment l’avoir comme partenaire d’entraînement, quelqu’un avec qui jouer de temps en temps », a déclaré l’un des participants à l’étude.




Général
Anker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
Découvrez le Solarbank 2 AC, une véritable révolution dans le domaine de l’énergie solaire ! Grâce à ses batteries au phosphate de fer lithium, ce système s’adapte parfaitement à vos besoins. Avec une puissance impressionnante de 2400 watts et la possibilité d’ajouter jusqu’à cinq batteries supplémentaires, il assure un stockage optimal. Sa compatibilité avec le compteur Anker SOLIX Smart favorise une gestion intelligente de votre consommation énergétique. Ne ratez pas l’offre spéciale « early bird », disponible dès maintenant pour seulement 999 euros ! Saisissez cette chance unique !

Le Solarbank 2 AC : Une Révolution dans le Stockage Énergétique
Batteries au Lithium Fer Phosphate
Le Solarbank 2 AC se démarque par l’utilisation de batteries au lithium fer phosphate (LFP), reconnues pour leur sécurité et leur efficacité. Ce modèle est particulièrement innovant grâce à son système de couplage alternatif, qui lui permet de s’adapter facilement à divers systèmes solaires déjà en place.Que ce soit pour des installations sur toiture, des systèmes solaires compacts pour balcons ou d’autres configurations réduites, il peut fonctionner avec un micro-onduleur de 800 Watts.
Capacité et flexibilité Énergétique
Avec une capacité maximale d’injection dans le réseau domestique atteignant 1200 watts,le Solarbank 2 AC peut être associé à deux régulateurs solaires MPPT. Cela ouvre la possibilité d’ajouter jusqu’à 1200 watts supplémentaires via des panneaux solaires additionnels, portant ainsi la puissance totale à un impressionnant 2400 watts. Pour les utilisateurs nécessitant davantage de stockage énergétique, il est possible d’intégrer jusqu’à cinq batteries supplémentaires de 1,6 kilowattheure chacune, augmentant la capacité totale à 9,6 kilowattheures.
Intégration dans un Écosystème Intelligent
Le Solarbank 2 AC s’intègre parfaitement dans un écosystème énergétique intelligent grâce à sa compatibilité avec le compteur Anker SOLIX Smart et les prises intelligentes proposées par Anker. cette fonctionnalité permet une gestion optimisée de la consommation électrique tout en réduisant les pertes énergétiques inutiles. De plus, Anker SOLIX prévoit d’étendre cette compatibilité aux dispositifs Shelly.
Durabilité et Résistance aux Intempéries
Anker SOLIX met également l’accent sur la longévité du Solarbank 2 AC. Conçu pour supporter au moins 6000 cycles de charge, cet appareil a une durée de vie estimée dépassant quinze ans. Il est accompagné d’une garantie fabricant décennale et possède une certification IP65 qui assure sa résistance face aux intempéries tout en étant capable de fonctionner dans des températures variant entre -20 °C et +55 °C.
Disponibilité et Offres Promotionnelles
Le solarbank 2 AC est disponible sur le site officiel d’Anker SOLIX ainsi que sur Amazon au prix standard de 1299 euros. Cependant, une offre promotionnelle « early bird » sera active du 20 janvier au 23 février 2025, permettant aux acheteurs intéressés d’acquérir cet appareil dès 999 euros ! Cette promotion inclut également un compteur Anker SOLIX Smart offert pour chaque commande passée durant cette période spéciale.
le Solarbank 2 AC représente une avancée significative dans le domaine du stockage énergétique domestique grâce à ses caractéristiques techniques avancées et son engagement envers la durabilité environnementale.
Business
Une formidable nouvelle pour les conducteurs de voitures électriques !
Excellente nouvelle pour les conducteurs de véhicules électriques ! La recharge gratuite sur le lieu de travail sera exonérée d’impôts jusqu’en 2025. Annoncée par le ministère de l’Économie, cette mesure incitative, en place depuis 2020, s’inscrit dans une dynamique de croissance impressionnante avec une progression annuelle moyenne de 35%. Les entreprises peuvent ainsi offrir des bornes de recharge sans impact fiscal, stimulant la transition écologique. Reste à savoir si cela suffira à convaincre les entreprises hésitantes et à propulser l’électrification des flottes professionnelles vers un avenir durable.

Technologie
Recharge Électrique au Bureau : Une Exonération Fiscale Renouvelée
Les détenteurs de véhicules électriques et leurs employeurs peuvent se réjouir : la possibilité d’effectuer des recharges gratuites sur le lieu de travail sera exonérée d’impôts jusqu’en 2025. Cette décision, annoncée par le ministère des Finances, prolonge une initiative lancée en 2020 pour encourager l’adoption des véhicules électriques dans les entreprises.
Un Secteur en Croissance Dynamique
Cette prolongation intervient à un moment clé, alors que le marché des voitures électriques continue d’afficher une croissance remarquable. Entre 2020 et 2022, la progression annuelle moyenne a atteint 35%. En 2023, les particuliers représentent désormais 84% des acquisitions de véhicules électriques, contre seulement 68% en 2018.
Concrètement,cette mesure permet aux sociétés d’installer gratuitement des bornes de recharge pour leurs employés sans impact fiscal. Les frais liés à l’électricité pour ces recharges ne seront pas pris en compte dans le calcul des avantages en nature. De plus, un abattement de 50% sur ces avantages est maintenu avec un plafond révisé à environ 2000 euros pour l’année prochaine.
Accélération Vers une Mobilité Électrique
Cette initiative fait partie d’une stratégie globale visant à promouvoir l’électrification du parc automobile français. Cependant, les grandes entreprises rencontrent encore des difficultés pour atteindre leurs objectifs ; seulement 8% des nouveaux véhicules immatriculés par ces entités étaient électriques en 2023. Ces incitations fiscales pourraient néanmoins inciter davantage d’employeurs à franchir le pas.Cependant, plusieurs défis demeurent concernant les infrastructures nécessaires au chargement ainsi que sur l’autonomie des véhicules et les perceptions parmi les employés. Par ailleurs, la réduction progressive du bonus écologique pour les utilitaires et sa diminution pour les particuliers pourraient freiner cet élan vers une adoption plus large.
Avenir Prometteur Pour La Mobilité Électrique
Malgré ces obstacles potentiels, il existe un optimisme quant au futur de la mobilité électrique dans le milieu professionnel. Les avancées technologiques continues ainsi qu’un engagement croissant envers la durabilité devraient continuer à favoriser cette tendance vers une adoption accrue des véhicules écologiques.
En maintenant ces mesures fiscales avantageuses jusqu’en 2025 et au-delà, le gouvernement délivre un message fort soutenant la transition écologique dans le secteur du transport. Reste maintenant à voir si cela suffira réellement à convaincre certaines entreprises hésitantes et si cela permettra d’accélérer significativement l’électrification de leurs flottes professionnelles dans un avenir proche.
Divertissement
« À la rencontre d’un Hugo : une aventure inattendue »
Le prénom, un véritable reflet de notre identité, peut être à la fois lourd à porter et source de fierté. Dans cette chronique fascinante, le réalisateur Hugo David nous plonge dans son expérience avec un prénom très répandu. Né en 2000, il se retrouve entouré d’autres Hugo, ce qui l’amène à adopter un alias : Hugo D.. Comment ce choix a-t-il influencé son parcours ? Explorez les nuances et les histoires derrière nos prénoms et découvrez comment ils façonnent nos vies dès l’enfance jusqu’à l’âge adulte !

Les Prénoms : Un Voyage au Cœur de l’Identité
Le Rôle Crucial des Prénoms dans nos Existences
Chaque personne possède un prénom, qu’il soit courant ou singulier, et ce dernier peut engendrer à la fois fierté et embarras. Cet article explore la signification profonde et l’influence des prénoms sur notre vie quotidienne. Le réalisateur Hugo David partage son vécu avec un prénom qui a connu une forte popularité durant sa jeunesse.
une Naissance Sous le Signe de la Célébrité
Hugo David est né en 2000 à Tours, une époque où le prénom Hugo était en plein essor. Ses parents, Caroline et Rodolphe, avaient envisagé d’autres choix comme Enzo, également très en vogue à cette période. « Je pense que mes parents ont opté pour un prénom parmi les plus répandus en France plutôt qu’en hommage à Victor Hugo », confie-t-il.
Une Enfance Entourée d’Autres « Hugo »
Dès son plus jeune âge, Hugo se retrouve entouré d’autres enfants portant le même nom. Selon les statistiques de l’Insee,7 694 garçons ont été prénommés Hugo en 2000,faisant de ce prénom le quatrième plus populaire cette année-là. À l’école primaire,il côtoie plusieurs camarades appelés Thibault et autres prénoms similaires. Pour éviter toute confusion lors des appels en classe, les enseignants ajoutent souvent la première lettre du nom de famille après le prénom : ainsi devient-il rapidement « Hugo D. », un surnom auquel il s’habitue sans arduousé.
Pensées sur l’Identité Associée au Prénom
Le choix d’un prénom peut avoir un impact significatif sur notre identité personnelle tout au long de notre existence. Que ce soit pour se distinguer ou pour s’intégrer dans un groupe social spécifique, chaque individu développe une relation particulière avec son propre nom.
les prénoms ne sont pas simplement des désignations ; ils portent avec eux des récits et influencent nos interactions sociales depuis notre enfance jusqu’à l’âge adulte.
-
 Business2 ans ago
Business2 ans agoComment lutter efficacement contre le financement du terrorisme au Nigeria : le point de vue du directeur de la NFIU
-
 Général2 ans ago
Général2 ans agoX (anciennement Twitter) permet enfin de trier les réponses sur iPhone !
-

 Technologie1 an ago
Technologie1 an agoTikTok revient en force aux États-Unis, mais pas sur l’App Store !
-

 Général1 an ago
Général1 an agoAnker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
-
 Général1 an ago
Général1 an agoLa Gazelle de Val (405) : La Star Incontournable du Quinté d’Aujourd’hui !
-
 Sport1 an ago
Sport1 an agoSaisissez les opportunités en or ce lundi 20 janvier 2025 !
-

 Business1 an ago
Business1 an agoUne formidable nouvelle pour les conducteurs de voitures électriques !
-
 Science et nature1 an ago
Science et nature1 an agoLes meilleures offres du MacBook Pro ce mois-ci !