Général
Le robot humanoïde Figure 02 : des améliorations révolutionnaires à découvrir !
La technologie des robots humanoïdes fait un bond en avant ! La société Figure a dévoilé un teaser captivant de son nouveau robot, le Figure 02. Ce qui attire immédiatement l’attention, c’est le design innovant de son pied, inspiré de l’anatomie humaine, mais avec des caractéristiques uniques pour une meilleure traction. Les articulations des jambes et des hanches promettent une mobilité impressionnante, tandis que la main redessinée offre une dextérité remarquable. Restez à l’affût pour découvrir comment cette technologie révolutionnaire pourrait transformer notre interaction avec les robots !

La société de robotique Figure a récemment dévoilé une nouvelle vidéo teaser de son robot Figure 02.
Analysons les nouveautés présentées dans cette vidéo.
Technologie des Pieds
La vidéo commence par un gros plan sur le pied du robot, qui a été entièrement repensé pour améliorer son interaction avec le sol.
De profil, on observe un pied qui ressemble beaucoup à un pied humain, s’affinant vers les orteils, prêt à accueillir une chaussure.
Cependant, la partie arrière du pied se distingue nettement de l’inspiration humaine, avec un espace entre la cheville et le talon. Lorsque la caméra pivote pour montrer l’arrière, on voit le pied se soulever, amorçant ainsi le mouvement de marche.
Dans cette perspective, l’espace, associé à l’articulation angulaire, permet au pied de pivoter, imitant ainsi le mouvement naturel de nos pieds et chevilles.
Sur la semelle, des bosses texturées sont visibles, probablement conçues pour offrir une meilleure adhérence sur différentes surfaces. Des matériaux comme le carrelage ou le béton humide pourraient être glissants, et cette texture devrait aider à maintenir le pied en place lors des déplacements. Cela soulève toutefois la question de l’usure au fil du temps.
Technologie des Hanches et des Jambes
La vidéo se déplace vers le haut du corps pour révéler une série de nouveaux actionneurs. Voici les performances de chaque actionneur présentées dans la vidéo, utilisés dans les genoux et les hanches du robot Figure 02.
- A2 – Couple de 50Nm, Amplitude de Mouvement (AM) – 48°
- L4 – Couple de 150Nm, AM 135°
- L1 – Couple de 150Nm, AM 195°
Au fur et à mesure que la vidéo progresse, on constate que les deux jambes sont symétriques, échangeant leur position de gauche à droite. En rendant les composants identiques des deux côtés, on réduit la complexité et les coûts de fabrication. Cela repose ensuite sur un logiciel pour s’adapter à quel côté du corps ils sont utilisés.
Technologie des Actionneurs
Le domaine des robots humanoïdes est extrêmement concurrentiel, et l’un des principaux facteurs de différenciation est la conception des actionneurs. Opter pour des solutions toutes faites n’est pas envisageable, et Figure présente ici un actionneur éclaté montrant des éléments souvent invisibles, ce qui suscite sans doute un grand intérêt chez les concurrents.
Les actionneurs doivent être compacts, puissants, fiables et abordables, ce qui représente un défi considérable. Comme nous l’avons vu, ces actionneurs ne sont pas identiques sur tout le corps, mais sont dimensionnés en fonction des caractéristiques de performance.
Cette décision est probablement motivée par l’efficacité, car des actionneurs plus grands consomment plus d’énergie, ce qui impacte directement l’autonomie de la batterie du robot humanoïde.
En optimisant la consommation d’énergie à travers le robot, il est possible de réduire le nombre de batteries nécessaires, diminuant ainsi le poids et les coûts associés.
Structures Flexibles
Un des moments marquants de la vidéo se situe à la 28e seconde, où l’on aperçoit des structures hexagonales (probablement imprimées en 3D) qui s’assemblent pour former un maillage. La vidéo présente plusieurs exemples de cette innovation, et vers 31 secondes, nous découvrons quelque chose de révolutionnaire.
Cette structure 3D passe d’une forme pliable à une forme rigide lorsque l’actionneur au-dessus d’elle tourne. Jusqu’à présent, les surfaces des robots étaient rigides, mais nos corps humains se plient et se déplacent, et avoir des surfaces capables de refléter cela est très utile.
Les robots interagiront dans des environnements humains, ce qui signifie que les humains pourraient toucher le robot. Les fabricants doivent donc prendre en compte les points de pincement où un doigt pourrait se coincer. Avoir des protections sur les articulations est un aspect de sécurité essentiel.
J’apprécie que Figure ait montré la structure en blanc, ainsi que la version noire qui sera présente sur le robot final, qui s’intègre parfaitement dans le design.
Technologie de la Main
La partie la plus impressionnante de la vidéo concerne la main. Figure 02 présente une main qui imite de près celle d’un humain, une refonte complète par rapport à Figure 01.
Comme pour les bosses de préhension sur le pied, les bouts des doigts sont désormais dotés de petites bosses (probablement en caoutchouc) pour améliorer l’adhérence. Bien que les robots manquent des propriétés texturées de notre peau, ces petites bosses visent clairement à reproduire notre capacité à saisir des objets.
Chaque doigt a des longueurs différentes et comporte trois segments qui se fixent à la paume. La vidéo montre les doigts se repliant en un poing, puis revenant à une main ouverte. Nous supposons que le mouvement est à vitesse réelle, ce qui démontre une dextérité et une rapidité impressionnantes.
Ce qui est encore plus remarquable, c’est le pouce opposable qui peut se déplacer dans trois dimensions. Il a la capacité de s’enfoncer vers les autres doigts, ce qui améliore sa capacité à tenir des objets.
Il convient également de souligner le nouveau design du poignet, qui est très différent de ce que nous avons vu auparavant, étant très fin et semblant se connecter à une articulation sphérique.
Technologie de la Tête
Nous voyons très peu de la tête de Figure 02 dans ce teaser. Les éléments essentiels de l’opération sont probablement réservés pour la révélation complète prévue le 6 août.
De l’aperçu que nous avons, le visage présente un écran et indique le niveau de batterie. Les visages humanoïdes aident généralement à montrer l’intention aux humains qui les entourent, donc bien que nous ne voyions pas de visage numérique, nous remarquons quelques instances où des lumières s’allument, probablement en corrélation avec les actions du robot.
Un autre élément à noter est le cou, qui est recouvert d’un matériau en maille. Cela ressemble à la maille que l’on trouve sur les grilles de haut-parleurs. Nous voyons le robot Figure 02 tourner son cou en arrière, comme un humain levant les yeux au loin.
Ce qui n’est pas clair, c’est le nombre de degrés de liberté du cou. Étant donné les mouvements observés ailleurs dans le corps, il ne serait pas surprenant que le robot puisse incliner son cou de gauche à droite et le faire pivoter comme le font les humains.
Technologie des Batteries
Cette séquence est rapide, mais il semble que le torse principal du robot supporte un couvercle portant les mots « Fabriqué en Californie ». Une prise de vue montre ce couvercle soulevé, offrant un aperçu des batteries logées à l’intérieur.
Bien que notre visibilité sur l’ensemble du compartiment à batteries soit limitée, d’après ce que nous pouvons voir, il y a au moins 6 rangées de large et 8 rangées de profondeur, ce qui signifie qu’il y a au moins 48 cellules, mais elles continuent hors du cadre, rendant impossible une évaluation précise.
Ces batteries semblent pouvoir être remplacées individuellement, plutôt que comme un pack entier, ce qui est un concept intéressant. Certaines d’entre elles semblent avoir une languette saillante à l’extrémité, comme le terminal positif, tandis que d’autres n’en ont pas, suggérant qu’elles pourraient être négatives et orientées dans la direction opposée. Ce qui n’est pas clair, c’est comment le contact est établi entre toutes les cellules de la batterie pour les connecter en série.
Le fait qu’elles soient exposées soulève également la question du refroidissement. En général, nous voyons des packs de batteries dotés d’une gestion thermique, avec un refroidissement actif et une isolation entre les cellules. Il reste encore beaucoup à découvrir lors de la présentation complète.
Résumé de la Technologie
Vous pouvez visionner la vidéo teaser de Figure 02 ci-dessous. Bien que nous ayons appris beaucoup sur le matériel de leur robot de nouvelle génération, nous attendons encore des informations sur l’aspect logiciel.
Les robots humanoïdes sont finalement une combinaison de matériel de qualité et de logiciel performant. Pour être utiles, la plateforme robotique doit soutenir la formation et le développement de nouvelles compétences, être capable d’identifier des objets et déterminer comment elle doit se déplacer pour accomplir des tâches définies.





Général
Anker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
Découvrez le Solarbank 2 AC, une véritable révolution dans le domaine de l’énergie solaire ! Grâce à ses batteries au phosphate de fer lithium, ce système s’adapte parfaitement à vos besoins. Avec une puissance impressionnante de 2400 watts et la possibilité d’ajouter jusqu’à cinq batteries supplémentaires, il assure un stockage optimal. Sa compatibilité avec le compteur Anker SOLIX Smart favorise une gestion intelligente de votre consommation énergétique. Ne ratez pas l’offre spéciale « early bird », disponible dès maintenant pour seulement 999 euros ! Saisissez cette chance unique !

Le Solarbank 2 AC : Une Révolution dans le Stockage Énergétique
Batteries au Lithium Fer Phosphate
Le Solarbank 2 AC se démarque par l’utilisation de batteries au lithium fer phosphate (LFP), reconnues pour leur sécurité et leur efficacité. Ce modèle est particulièrement innovant grâce à son système de couplage alternatif, qui lui permet de s’adapter facilement à divers systèmes solaires déjà en place.Que ce soit pour des installations sur toiture, des systèmes solaires compacts pour balcons ou d’autres configurations réduites, il peut fonctionner avec un micro-onduleur de 800 Watts.
Capacité et flexibilité Énergétique
Avec une capacité maximale d’injection dans le réseau domestique atteignant 1200 watts,le Solarbank 2 AC peut être associé à deux régulateurs solaires MPPT. Cela ouvre la possibilité d’ajouter jusqu’à 1200 watts supplémentaires via des panneaux solaires additionnels, portant ainsi la puissance totale à un impressionnant 2400 watts. Pour les utilisateurs nécessitant davantage de stockage énergétique, il est possible d’intégrer jusqu’à cinq batteries supplémentaires de 1,6 kilowattheure chacune, augmentant la capacité totale à 9,6 kilowattheures.
Intégration dans un Écosystème Intelligent
Le Solarbank 2 AC s’intègre parfaitement dans un écosystème énergétique intelligent grâce à sa compatibilité avec le compteur Anker SOLIX Smart et les prises intelligentes proposées par Anker. cette fonctionnalité permet une gestion optimisée de la consommation électrique tout en réduisant les pertes énergétiques inutiles. De plus, Anker SOLIX prévoit d’étendre cette compatibilité aux dispositifs Shelly.
Durabilité et Résistance aux Intempéries
Anker SOLIX met également l’accent sur la longévité du Solarbank 2 AC. Conçu pour supporter au moins 6000 cycles de charge, cet appareil a une durée de vie estimée dépassant quinze ans. Il est accompagné d’une garantie fabricant décennale et possède une certification IP65 qui assure sa résistance face aux intempéries tout en étant capable de fonctionner dans des températures variant entre -20 °C et +55 °C.
Disponibilité et Offres Promotionnelles
Le solarbank 2 AC est disponible sur le site officiel d’Anker SOLIX ainsi que sur Amazon au prix standard de 1299 euros. Cependant, une offre promotionnelle « early bird » sera active du 20 janvier au 23 février 2025, permettant aux acheteurs intéressés d’acquérir cet appareil dès 999 euros ! Cette promotion inclut également un compteur Anker SOLIX Smart offert pour chaque commande passée durant cette période spéciale.
le Solarbank 2 AC représente une avancée significative dans le domaine du stockage énergétique domestique grâce à ses caractéristiques techniques avancées et son engagement envers la durabilité environnementale.
Business
Une formidable nouvelle pour les conducteurs de voitures électriques !
Excellente nouvelle pour les conducteurs de véhicules électriques ! La recharge gratuite sur le lieu de travail sera exonérée d’impôts jusqu’en 2025. Annoncée par le ministère de l’Économie, cette mesure incitative, en place depuis 2020, s’inscrit dans une dynamique de croissance impressionnante avec une progression annuelle moyenne de 35%. Les entreprises peuvent ainsi offrir des bornes de recharge sans impact fiscal, stimulant la transition écologique. Reste à savoir si cela suffira à convaincre les entreprises hésitantes et à propulser l’électrification des flottes professionnelles vers un avenir durable.

Technologie
Recharge Électrique au Bureau : Une Exonération Fiscale Renouvelée
Les détenteurs de véhicules électriques et leurs employeurs peuvent se réjouir : la possibilité d’effectuer des recharges gratuites sur le lieu de travail sera exonérée d’impôts jusqu’en 2025. Cette décision, annoncée par le ministère des Finances, prolonge une initiative lancée en 2020 pour encourager l’adoption des véhicules électriques dans les entreprises.
Un Secteur en Croissance Dynamique
Cette prolongation intervient à un moment clé, alors que le marché des voitures électriques continue d’afficher une croissance remarquable. Entre 2020 et 2022, la progression annuelle moyenne a atteint 35%. En 2023, les particuliers représentent désormais 84% des acquisitions de véhicules électriques, contre seulement 68% en 2018.
Concrètement,cette mesure permet aux sociétés d’installer gratuitement des bornes de recharge pour leurs employés sans impact fiscal. Les frais liés à l’électricité pour ces recharges ne seront pas pris en compte dans le calcul des avantages en nature. De plus, un abattement de 50% sur ces avantages est maintenu avec un plafond révisé à environ 2000 euros pour l’année prochaine.
Accélération Vers une Mobilité Électrique
Cette initiative fait partie d’une stratégie globale visant à promouvoir l’électrification du parc automobile français. Cependant, les grandes entreprises rencontrent encore des difficultés pour atteindre leurs objectifs ; seulement 8% des nouveaux véhicules immatriculés par ces entités étaient électriques en 2023. Ces incitations fiscales pourraient néanmoins inciter davantage d’employeurs à franchir le pas.Cependant, plusieurs défis demeurent concernant les infrastructures nécessaires au chargement ainsi que sur l’autonomie des véhicules et les perceptions parmi les employés. Par ailleurs, la réduction progressive du bonus écologique pour les utilitaires et sa diminution pour les particuliers pourraient freiner cet élan vers une adoption plus large.
Avenir Prometteur Pour La Mobilité Électrique
Malgré ces obstacles potentiels, il existe un optimisme quant au futur de la mobilité électrique dans le milieu professionnel. Les avancées technologiques continues ainsi qu’un engagement croissant envers la durabilité devraient continuer à favoriser cette tendance vers une adoption accrue des véhicules écologiques.
En maintenant ces mesures fiscales avantageuses jusqu’en 2025 et au-delà, le gouvernement délivre un message fort soutenant la transition écologique dans le secteur du transport. Reste maintenant à voir si cela suffira réellement à convaincre certaines entreprises hésitantes et si cela permettra d’accélérer significativement l’électrification de leurs flottes professionnelles dans un avenir proche.
Divertissement
« À la rencontre d’un Hugo : une aventure inattendue »
Le prénom, un véritable reflet de notre identité, peut être à la fois lourd à porter et source de fierté. Dans cette chronique fascinante, le réalisateur Hugo David nous plonge dans son expérience avec un prénom très répandu. Né en 2000, il se retrouve entouré d’autres Hugo, ce qui l’amène à adopter un alias : Hugo D.. Comment ce choix a-t-il influencé son parcours ? Explorez les nuances et les histoires derrière nos prénoms et découvrez comment ils façonnent nos vies dès l’enfance jusqu’à l’âge adulte !

Les Prénoms : Un Voyage au Cœur de l’Identité
Le Rôle Crucial des Prénoms dans nos Existences
Chaque personne possède un prénom, qu’il soit courant ou singulier, et ce dernier peut engendrer à la fois fierté et embarras. Cet article explore la signification profonde et l’influence des prénoms sur notre vie quotidienne. Le réalisateur Hugo David partage son vécu avec un prénom qui a connu une forte popularité durant sa jeunesse.
une Naissance Sous le Signe de la Célébrité
Hugo David est né en 2000 à Tours, une époque où le prénom Hugo était en plein essor. Ses parents, Caroline et Rodolphe, avaient envisagé d’autres choix comme Enzo, également très en vogue à cette période. « Je pense que mes parents ont opté pour un prénom parmi les plus répandus en France plutôt qu’en hommage à Victor Hugo », confie-t-il.
Une Enfance Entourée d’Autres « Hugo »
Dès son plus jeune âge, Hugo se retrouve entouré d’autres enfants portant le même nom. Selon les statistiques de l’Insee,7 694 garçons ont été prénommés Hugo en 2000,faisant de ce prénom le quatrième plus populaire cette année-là. À l’école primaire,il côtoie plusieurs camarades appelés Thibault et autres prénoms similaires. Pour éviter toute confusion lors des appels en classe, les enseignants ajoutent souvent la première lettre du nom de famille après le prénom : ainsi devient-il rapidement « Hugo D. », un surnom auquel il s’habitue sans arduousé.
Pensées sur l’Identité Associée au Prénom
Le choix d’un prénom peut avoir un impact significatif sur notre identité personnelle tout au long de notre existence. Que ce soit pour se distinguer ou pour s’intégrer dans un groupe social spécifique, chaque individu développe une relation particulière avec son propre nom.
les prénoms ne sont pas simplement des désignations ; ils portent avec eux des récits et influencent nos interactions sociales depuis notre enfance jusqu’à l’âge adulte.
-
 Business2 ans ago
Business2 ans agoComment lutter efficacement contre le financement du terrorisme au Nigeria : le point de vue du directeur de la NFIU
-
 Général2 ans ago
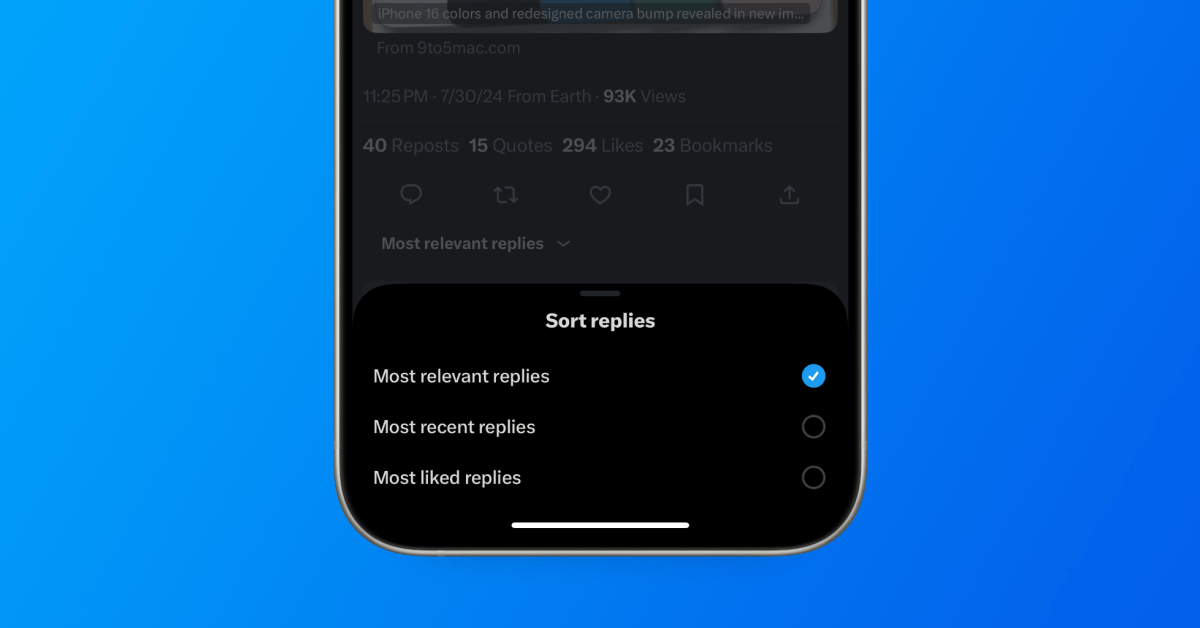
Général2 ans agoX (anciennement Twitter) permet enfin de trier les réponses sur iPhone !
-

 Technologie1 an ago
Technologie1 an agoTikTok revient en force aux États-Unis, mais pas sur l’App Store !
-

 Général1 an ago
Général1 an agoAnker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
-
 Général1 an ago
Général1 an agoLa Gazelle de Val (405) : La Star Incontournable du Quinté d’Aujourd’hui !
-
 Sport1 an ago
Sport1 an agoSaisissez les opportunités en or ce lundi 20 janvier 2025 !
-

 Business1 an ago
Business1 an agoUne formidable nouvelle pour les conducteurs de voitures électriques !
-
 Science et nature1 an ago
Science et nature1 an agoLes meilleures offres du MacBook Pro ce mois-ci !