Technologie
L’Imperial College de Londres et DeepMind dévoilent des agents incarnés qui apprennent avec moins de données !
Les agents d’IA incarnée révolutionnent notre interaction avec le monde physique, mais un défi majeur persiste : la pénurie de données d’entraînement. Pour surmonter cet obstacle, des chercheurs d’Imperial College London et de Google DeepMind ont développé les Agents Augmentés par Diffusion (DAAG). Ce cadre innovant utilise la puissance des modèles de langage et de vision pour améliorer l’efficacité d’apprentissage des agents. Grâce à des techniques comme l’Augmentation d’Expérience Rétrospective, DAAG permet aux agents d’apprendre plus rapidement et de s’adapter à de nouvelles tâches, ouvrant ainsi la voie à des robots plus intelligents et flexibles.
Technologie
Date de publication : 9 août 2024 à 7h28
Les agents d’IA incarnée capables d’interagir avec le monde physique présentent un potentiel considérable pour diverses applications. Cependant, le manque de données d’entraînement demeure l’un de leurs principaux obstacles.
Pour surmonter ce défi, des chercheurs de l’Imperial College de Londres et de Google DeepMind ont développé les Agents Augmentés par Diffusion (DAAG), un cadre novateur qui exploite la puissance des grands modèles de langage (LLMs), des modèles de langage visuel (VLMs) et des modèles de diffusion pour améliorer l’efficacité d’apprentissage et les capacités de transfert d’apprentissage des agents incarnés.
Importance de l’efficacité des données pour les agents incarnés
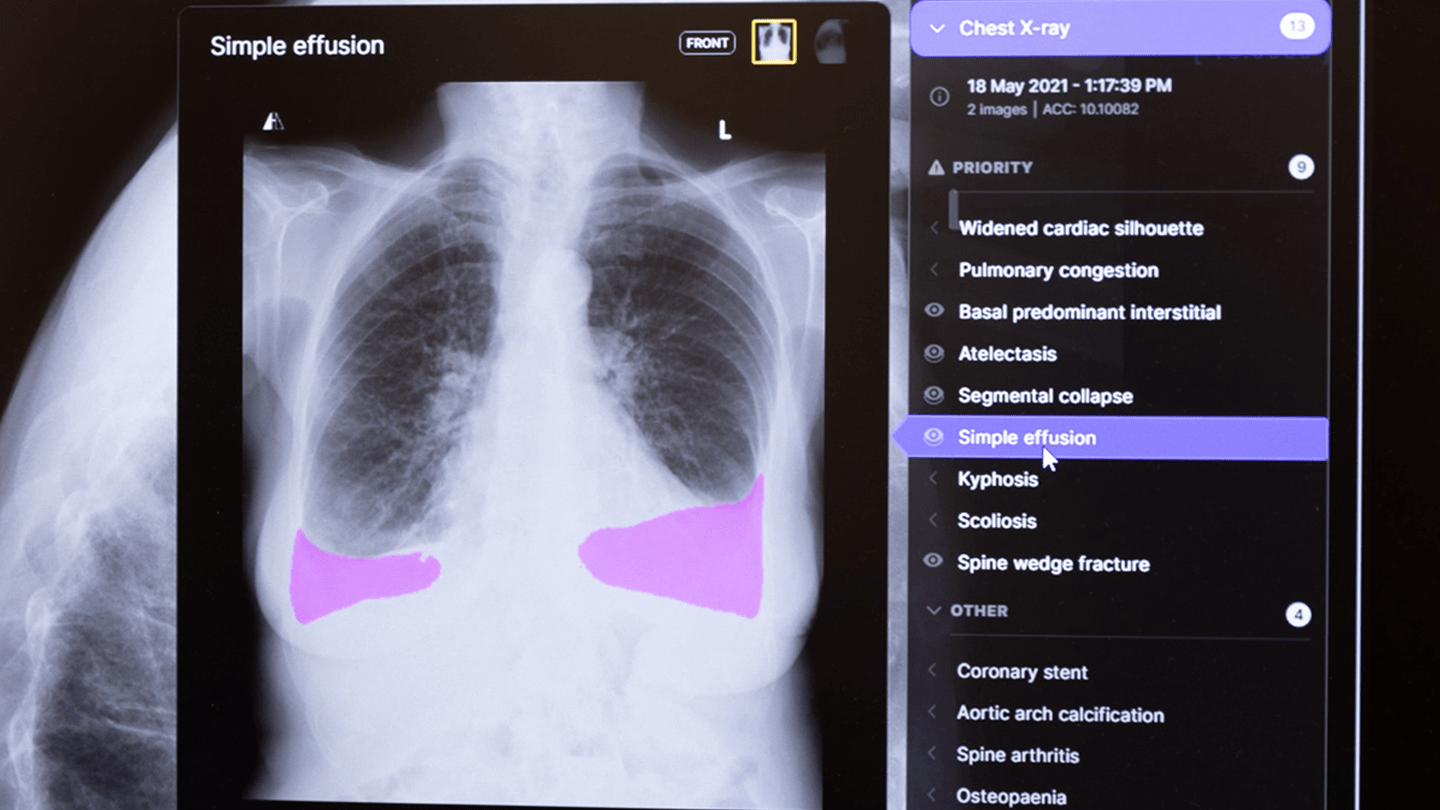
Les avancées impressionnantes des LLMs et des VLMs ces dernières années ont suscité des espoirs quant à leur application dans la robotique et l’IA incarnée. Cependant, bien que ces modèles puissent être formés sur d’énormes ensembles de données textuelles et d’images extraites d’Internet, les systèmes d’IA incarnée doivent apprendre en interagissant avec le monde physique.
Le monde réel présente plusieurs défis pour la collecte de données en IA incarnée. Premièrement, les environnements physiques sont beaucoup plus complexes et imprévisibles que le monde numérique. Deuxièmement, les robots et autres systèmes d’IA incarnée dépendent de capteurs et d’actionneurs physiques, qui peuvent être lents, bruyants et sujets à des pannes.
Les chercheurs estiment que surmonter cet obstacle dépendra d’une meilleure utilisation des données et de l’expérience existantes de l’agent.
« Nous émettons l’hypothèse que les agents incarnés peuvent atteindre une plus grande efficacité des données en s’appuyant sur leurs expériences passées pour explorer efficacement et transférer des connaissances entre les tâches », expliquent les chercheurs.
Qu’est-ce que DAAG ?
L’Agent Augmenté par Diffusion (DAAG), le cadre proposé par l’équipe de l’Imperial College et de DeepMind, est conçu pour permettre aux agents d’apprendre des tâches de manière plus efficace en utilisant des expériences passées et en générant des données synthétiques.
« Nous souhaitons permettre aux agents de définir et d’évaluer de manière autonome des sous-objectifs, même en l’absence de récompenses externes, et de réutiliser leur expérience des tâches précédentes pour accélérer l’apprentissage de nouvelles tâches », précisent les chercheurs.
DAAG est conçu comme un système d’apprentissage continu, où l’agent apprend et s’adapte en permanence à de nouvelles tâches.
DAAG fonctionne dans le cadre d’un processus de décision de Markov (MDP). L’agent reçoit des instructions pour une tâche au début de chaque épisode. Il observe l’état de son environnement, prend des mesures et essaie d’atteindre un état qui correspond à la tâche décrite.
Il dispose de deux mémoires : une mémoire spécifique à la tâche qui stocke les expériences de la tâche actuelle et une « mémoire de vie hors ligne » qui conserve toutes les expériences passées, indépendamment des tâches pour lesquelles elles ont été collectées ou de leurs résultats.
DAAG combine les forces des LLMs, des VLMs et des modèles de diffusion pour créer des agents capables de raisonner sur les tâches, d’analyser leur environnement et de réutiliser leurs expériences passées pour apprendre de nouveaux objectifs plus efficacement.
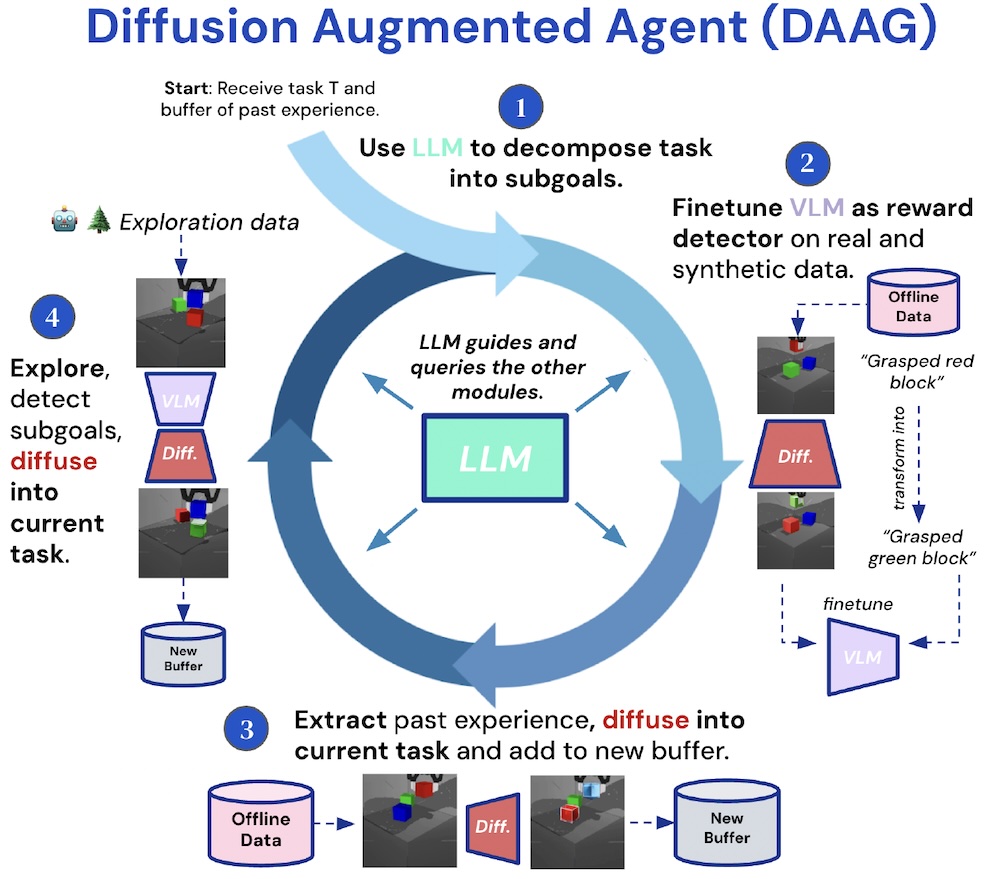
Le LLM agit comme le contrôleur central de l’agent. Lorsque l’agent reçoit une nouvelle tâche, le LLM interprète les instructions, les décompose en sous-objectifs et coordonne avec le VLM et le modèle de diffusion pour obtenir des cadres de référence pour atteindre ses objectifs.
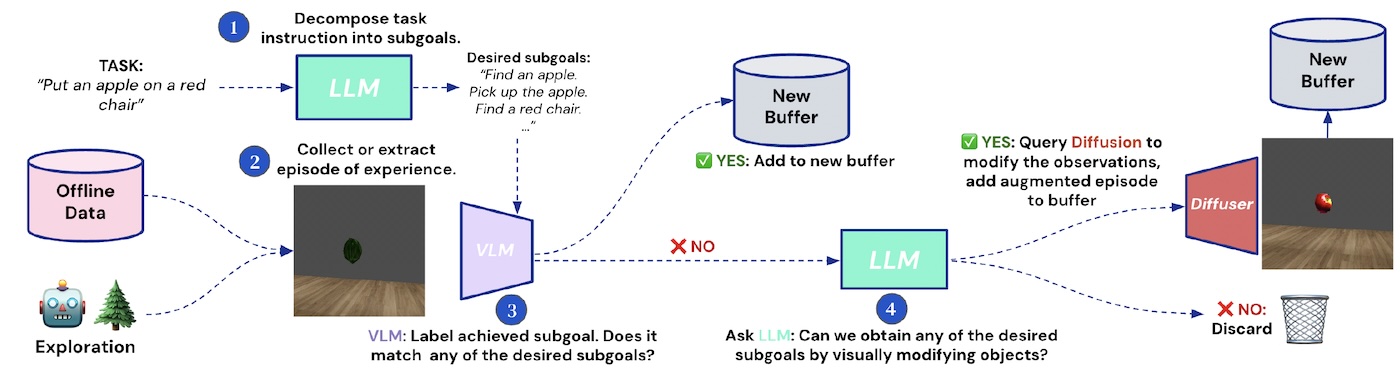
Pour tirer le meilleur parti de son expérience passée, DAAG utilise un processus appelé Augmentation d’Expérience Rétrospective (HEA), qui utilise le VLM et le modèle de diffusion pour enrichir la mémoire de l’agent.
Tout d’abord, le VLM traite les observations visuelles dans le tampon d’expérience et les compare aux sous-objectifs souhaités. Il ajoute les observations pertinentes au nouveau tampon de l’agent pour l’aider à orienter ses actions.
Si le tampon d’expérience ne contient pas d’observations pertinentes, le modèle de diffusion entre en jeu. Il génère des données synthétiques pour aider l’agent à « imaginer » à quoi ressemblerait l’état souhaité. Cela permet à l’agent d’explorer différentes possibilités sans interagir physiquement avec l’environnement.
« Grâce à HEA, nous pouvons augmenter synthétiquement le nombre d’épisodes réussis que l’agent peut stocker dans ses tampons et apprendre de », expliquent les chercheurs. « Cela permet de réutiliser efficacement autant de données collectées par l’agent que possible, améliorant considérablement l’efficacité, en particulier lors de l’apprentissage de plusieurs tâches successives. »
Les chercheurs décrivent DAAG et HEA comme la première méthode à proposer un pipeline autonome complet, indépendant de la supervision humaine, qui exploite la cohérence géométrique et temporelle pour générer des observations augmentées cohérentes.
Avantages de DAAG
Les chercheurs ont évalué DAAG sur plusieurs benchmarks et dans trois environnements simulés différents, mesurant sa performance sur des tâches telles que la navigation et la manipulation d’objets. Ils ont constaté que le cadre offrait des améliorations significatives par rapport aux systèmes d’apprentissage par renforcement de base.
Par exemple, les agents alimentés par DAAG ont réussi à apprendre à atteindre des objectifs même sans récompenses explicites. Ils ont également pu atteindre leurs objectifs plus rapidement et avec moins d’interactions avec l’environnement par rapport aux agents qui n’utilisaient pas le cadre. De plus, DAAG est mieux adapté pour réutiliser efficacement les données des tâches précédentes afin d’accélérer le processus d’apprentissage pour de nouveaux objectifs.
La capacité de transférer des connaissances entre les tâches est cruciale pour développer des agents capables d’apprendre en continu et de s’adapter à de nouvelles situations. Le succès de DAAG dans l’activation d’un transfert d’apprentissage efficace chez les agents incarnés pourrait ouvrir la voie à des robots et d’autres systèmes d’IA incarnée plus robustes et adaptables.
« Ce travail suggère des directions prometteuses pour surmonter la rareté des données dans l’apprentissage des robots et développer des agents plus généralement capables », concluent les chercheurs.




Général
Anker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
Découvrez le Solarbank 2 AC, une véritable révolution dans le domaine de l’énergie solaire ! Grâce à ses batteries au phosphate de fer lithium, ce système s’adapte parfaitement à vos besoins. Avec une puissance impressionnante de 2400 watts et la possibilité d’ajouter jusqu’à cinq batteries supplémentaires, il assure un stockage optimal. Sa compatibilité avec le compteur Anker SOLIX Smart favorise une gestion intelligente de votre consommation énergétique. Ne ratez pas l’offre spéciale « early bird », disponible dès maintenant pour seulement 999 euros ! Saisissez cette chance unique !

Le Solarbank 2 AC : Une Révolution dans le Stockage Énergétique
Batteries au Lithium Fer Phosphate
Le Solarbank 2 AC se démarque par l’utilisation de batteries au lithium fer phosphate (LFP), reconnues pour leur sécurité et leur efficacité. Ce modèle est particulièrement innovant grâce à son système de couplage alternatif, qui lui permet de s’adapter facilement à divers systèmes solaires déjà en place.Que ce soit pour des installations sur toiture, des systèmes solaires compacts pour balcons ou d’autres configurations réduites, il peut fonctionner avec un micro-onduleur de 800 Watts.
Capacité et flexibilité Énergétique
Avec une capacité maximale d’injection dans le réseau domestique atteignant 1200 watts,le Solarbank 2 AC peut être associé à deux régulateurs solaires MPPT. Cela ouvre la possibilité d’ajouter jusqu’à 1200 watts supplémentaires via des panneaux solaires additionnels, portant ainsi la puissance totale à un impressionnant 2400 watts. Pour les utilisateurs nécessitant davantage de stockage énergétique, il est possible d’intégrer jusqu’à cinq batteries supplémentaires de 1,6 kilowattheure chacune, augmentant la capacité totale à 9,6 kilowattheures.
Intégration dans un Écosystème Intelligent
Le Solarbank 2 AC s’intègre parfaitement dans un écosystème énergétique intelligent grâce à sa compatibilité avec le compteur Anker SOLIX Smart et les prises intelligentes proposées par Anker. cette fonctionnalité permet une gestion optimisée de la consommation électrique tout en réduisant les pertes énergétiques inutiles. De plus, Anker SOLIX prévoit d’étendre cette compatibilité aux dispositifs Shelly.
Durabilité et Résistance aux Intempéries
Anker SOLIX met également l’accent sur la longévité du Solarbank 2 AC. Conçu pour supporter au moins 6000 cycles de charge, cet appareil a une durée de vie estimée dépassant quinze ans. Il est accompagné d’une garantie fabricant décennale et possède une certification IP65 qui assure sa résistance face aux intempéries tout en étant capable de fonctionner dans des températures variant entre -20 °C et +55 °C.
Disponibilité et Offres Promotionnelles
Le solarbank 2 AC est disponible sur le site officiel d’Anker SOLIX ainsi que sur Amazon au prix standard de 1299 euros. Cependant, une offre promotionnelle « early bird » sera active du 20 janvier au 23 février 2025, permettant aux acheteurs intéressés d’acquérir cet appareil dès 999 euros ! Cette promotion inclut également un compteur Anker SOLIX Smart offert pour chaque commande passée durant cette période spéciale.
le Solarbank 2 AC représente une avancée significative dans le domaine du stockage énergétique domestique grâce à ses caractéristiques techniques avancées et son engagement envers la durabilité environnementale.
Technologie
Ne manquez pas cette offre incroyable : le Air Fryer Moulinex Easy Fry Max à -42% sur Amazon !
Les soldes d’hiver sont là ! Ne ratez pas l’incroyable offre d’Amazon sur le Moulinex Easy Fry Max, à seulement 69 euros au lieu de 119 euros, soit une réduction sensationnelle de -42% ! Avec sa capacité généreuse de 5 L, cette friteuse sans huile est idéale pour régaler jusqu’à 6 convives. Grâce à ses 10 programmes de cuisson et son interface tactile intuitive, préparez des plats sains et savoureux en un clin d’œil. Dépêchez-vous, les stocks s’épuisent vite et cette offre est limitée dans le temps !

Technologie
Les soldes d’hiver sont en cours, et Amazon en profite pour offrir des promotions intéressantes, notamment sur les friteuses à air. Actuellement, le Moulinex Easy Fry Max est proposé à un prix attractif de 69 euros au lieu de 119 euros, ce qui représente une réduction immédiate de 42 %. C’est une occasion parfaite pour acquérir une friteuse sans huile XL d’une capacité généreuse de 5 L, idéale pour préparer des repas pour jusqu’à six personnes à un tarif très compétitif.
Étant donné que cette offre est limitée dans le temps,il est conseillé d’agir rapidement si vous souhaitez en bénéficier. De plus, avec un tel prix, les stocks pourraient s’épuiser rapidement. Ce modèle se classe parmi les meilleures ventes sur Amazon avec plus de 1000 unités écoulées le mois dernier.
Profitez des offres sur Amazon
Amazon propose également la livraison gratuite et rapide pour cet article qui bénéficie d’une garantie de deux ans. En outre, il existe une option de paiement échelonné en quatre fois sans frais sur ce modèle. Enfin, sachez que vous avez la possibilité de changer d’avis et retourner le produit gratuitement dans un délai de 30 jours afin d’obtenir un remboursement intégral.
Moulinex Easy Fry Max : cuisinez sainement pour toute la famille
Le moulinex Easy Fry Max fonctionne comme un four à air chaud permettant la préparation de plats savoureux tout en utilisant peu ou pas du tout d’huile. En plus des frites croustillantes qu’il réalise parfaitement, cet appareil se révèle très polyvalent et peut cuisiner une multitude d’autres recettes.
avec ses dix programmes prédéfinis adaptés à divers ingrédients tels que poulet,steak,poisson ou légumes ainsi que des options pour bacon et desserts comme les pizzas ,cet appareil répond aux besoins variés des familles modernes. De plus, Moulinex met à disposition un livre numérique rempli de recettes accessible via QR Code afin que vous puissiez facilement trouver l’inspiration culinaire lorsque nécessaire.
Sa capacité généreuse permet non seulement la préparation rapide mais aussi économique : jusqu’à 70 % moins énergivore et presque deux fois plus rapide qu’un four traditionnel ! Son interface intuitive avec écran tactile facilite son utilisation quotidienne.
en outre, le panier antiadhésif compatible lave-vaisselle simplifie grandement l’entretien après chaque utilisation. N’oubliez pas qu’il s’agit là encore d’une offre temporaire ; ne tardez donc pas si vous souhaitez profiter du meilleur prix possible sur cette friteuse innovante !
Pour accéder à cette remise exceptionnelle :
Technologie
TikTok revient en force aux États-Unis, mais pas sur l’App Store !
Le suspense autour de TikTok est à son comble ! En avril 2024, le Congrès américain a voté une loi obligeant l’application à changer de propriétaire avant le 19 janvier. Les utilisateurs ont anxieusement attendu la décision finale. Bien que TikTok ait brièvement cessé ses activités, elle est revenue en ligne, mais absente de l’App Store. Apple justifie cette décision par des obligations légales. Cependant, les utilisateurs peuvent toujours accéder à leur compte… sans mises à jour. L’avenir de TikTok pourrait prendre un tournant décisif avec les promesses du nouveau président.
Technologie
En avril 2024, le Congrès américain a adopté une législation obligeant TikTok à trouver un nouvel acquéreur, ByteDance étant accusé d’activités d’espionnage. Les utilisateurs de l’submission aux États-Unis ont donc attendu avec impatience le week-end précédent la date limite du 19 janvier pour savoir si TikTok serait interdit dans le pays.
Bien que TikTok n’ait pas réussi à dénicher un repreneur avant cette échéance, l’application a temporairement suspendu ses activités… mais seulement pour quelques heures. le réseau social est désormais de retour en ligne, mais il n’est plus accessible sur l’App Store.
Retour de TikTok : Une Absence Persistante sur l’App Store
Apple a expliqué sa décision de retirer TikTok de son App store par un communiqué officiel. « Apple doit respecter les lois en vigueur dans les régions où elle opère. Selon la loi Protecting Americans from Foreign Adversary Controlled Applications act, les applications développées par ByteDance ltd., y compris TikTok et ses filiales comme CapCut et Lemon8, ne pourront plus être téléchargées ou mises à jour sur l’App Store pour les utilisateurs américains après le 19 janvier 2025 », précise la société.
Il est crucial de souligner que les utilisateurs américains ayant déjà installé TikTok peuvent toujours accéder au service. Cependant, ils ne recevront plus aucune mise à jour future de l’application. L’avenir du réseau social pourrait dépendre des décisions du nouveau président des États-Unis.
DÉCLARATION DE TIKTOK :
>
En collaboration avec nos partenaires techniques, nous travaillons activement à rétablir notre service. Nous remercions le président Trump pour avoir clarifié la situation et rassuré nos partenaires qu’ils ne subiront aucune sanction en continuant d’offrir TikTok aux plus de 170 millions d’utilisateurs…
Le successeur de Joe Biden sera investi comme président ce lundi 20 janvier et prévoit d’émettre un décret afin d’accorder un délai supplémentaire à TikTok pour trouver un acquéreur potentiel.Donald Trump propose même que les États-Unis détiennent une participation significative dans cette application.
« Je souhaite que les États-Unis possèdent une part importante dans une coentreprise avec cet outil numérique afin que nous puissions préserver son intégrité tout en lui permettant d’évoluer […]. Ainsi,notre pays détiendrait la moitié des parts dans une coentreprise établie entre nous et tout acheteur sélectionné »,a déclaré Donald Trump.
L’avenir immédiat de TikTok pourrait donc connaître des évolutions majeures très prochainement. Il convient également de noter qu’une rumeur circulait selon laquelle Elon Musk envisagerait d’acquérir des parts dans la plateforme,mais celle-ci a été rapidement démentie par un porte-parole officiel.
-
 Business2 ans ago
Business2 ans agoComment lutter efficacement contre le financement du terrorisme au Nigeria : le point de vue du directeur de la NFIU
-
 Général2 ans ago
Général2 ans agoX (anciennement Twitter) permet enfin de trier les réponses sur iPhone !
-

 Technologie1 an ago
Technologie1 an agoTikTok revient en force aux États-Unis, mais pas sur l’App Store !
-

 Général1 an ago
Général1 an agoAnker SOLIX dévoile la Solarbank 2 AC : la nouvelle ère du stockage d’énergie ultra-compatible !
-
 Général1 an ago
Général1 an agoLa Gazelle de Val (405) : La Star Incontournable du Quinté d’Aujourd’hui !
-
 Sport1 an ago
Sport1 an agoSaisissez les opportunités en or ce lundi 20 janvier 2025 !
-

 Business1 an ago
Business1 an agoUne formidable nouvelle pour les conducteurs de voitures électriques !
-

 Science et nature1 an ago
Science et nature1 an agoDes Projets Ambitieux qui Pourraient Redéfinir la Géopolitique